|
I am a first year graduate student at NewYork University pursuing my Masters in Mechatronics, Robotics and Automation Engineering.I am currently graduate research assistant atCILVR Lab, NYU under Dr. Lerrel Pinto. Here I work on self-supervised and reinforcement learning for Dexterous Manipulation. Previously I was a Researcher at Movement Generation and Control Group, Max Planck Institute for Intelligent Systems, Tubingen,Germany. Here I worked on learning highly dynamical locomotion policies for Quadrupedal Robot(Solo12) using Model Free Deep Reinforcement Learning, Imitation Learning and bridge the Sim2Real gap, under the supervision of Dr. Majid Khadiv. and Dr Ludovic Righetti. My research interests revolve around robot learning, perception and locomotion. In my previous works, I have worked on theoritical aspects of Reinforcement Learning as well as Domain Adaptation. On a broader perspective, my research focuses on learning based approaches for Autonomous Robot Locomotion. Apart from my research activities, I am a core-coordinator of IvLabs where I mentor a lot of students on various research projects. I also have conducted various IEEE workshops on Robotics in my sophomore year. I also served as the secretary of IEEE Student Branch ,VNIT Nagpur(Bombay Section), conducting and volunteering various workshops in and around my college. |

|
|
|
My Research interests are Reinforcement learning, Deep Learning, and Robot Learning. I work at the intersection of Machine learning and Robotics. My major works are highlighted. |
|
Aadhithya Iyer, Avadesh Meduri, Majid Khadiv, Ludovic Righetti May 2022- September 2022 Worked on imitation learning of robust policy generated by larger horizon NonLinearMPC that can be deployed on a Quadruped Robot(Solo12)for multiple high-dynamical motions and devising Robust Sim2Real Transfer approach. |

|
Aadhithya Iyer, Miroslav Bogdanovic, Majid Khadiv, Ludovic Righetti July 2021-April 2022 Worked on a Two-stage Online Reinforcement Learning approach for going from a single demonstration trajectory to a robust goal-conditioned policy that can be deployed on a Quadruped Robot(Solo12)for multiple high-dynamical motions and devising Robust Sim2Real Transfer approach. |
|
Adithya kumar Chinnakonda Ravi, Aadhithya Iyer, Miroslav Bogdanovic, Majid Khadiv, Ludovic Righetti Ongoing Work Working on Visuomotor learning for Quadruped Robot(Solo12) to learn agile parkour like motions. |
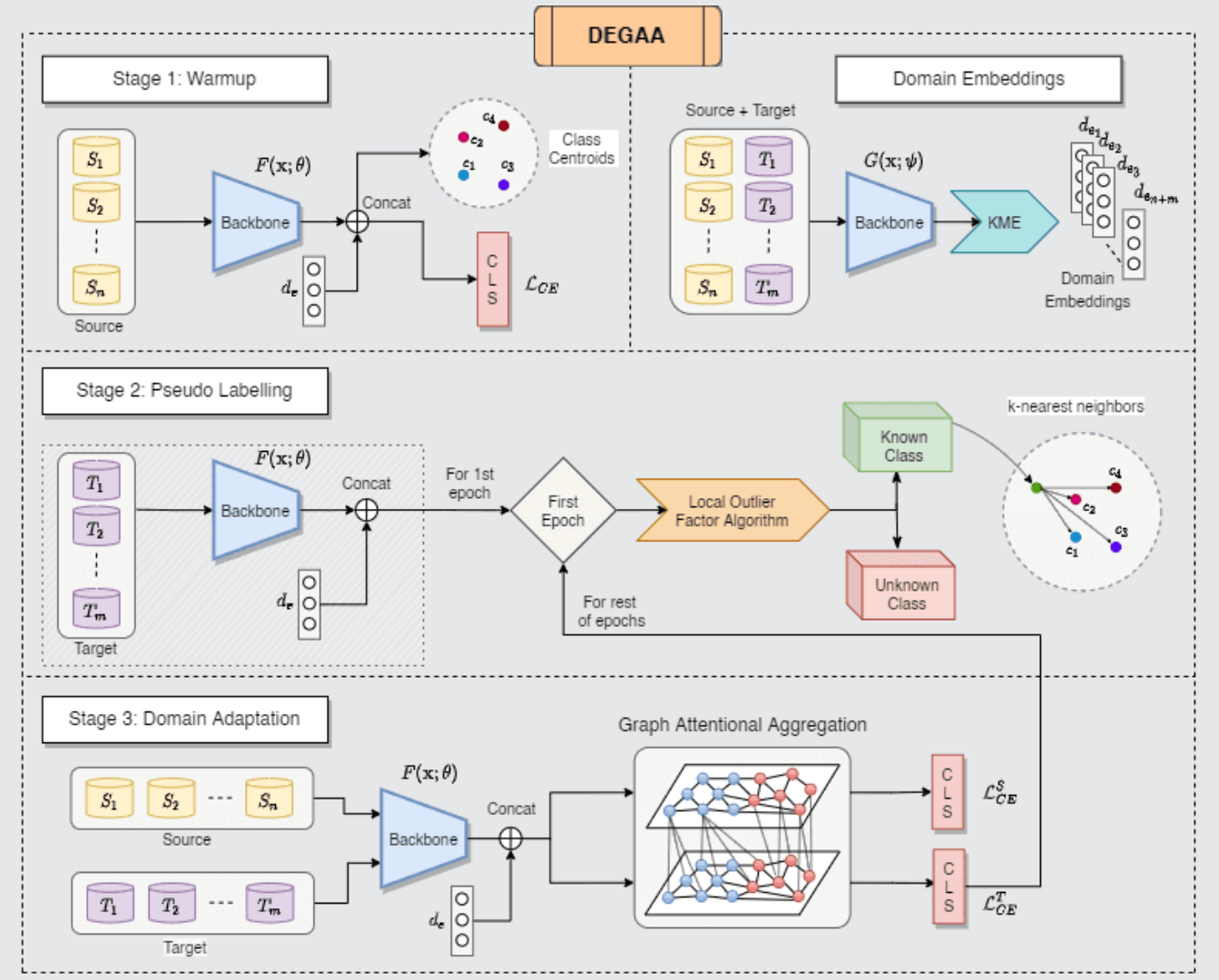 |
Rohit Lal, Arihant Gaur, Aadhithya Iyer, Mohammad Shaikh Abdullah, Ritik Agrawal, Shital Chiddarwar NeuRIPS, Workshop on PreRegistration in ML ,2021, Paper / Video / Poster A Novel generic domain adaptation (DA) setting with a graph attention based framework named DEGAA which can capture information from multiple source and target domains without knowing the exact label-set of the target which can be used in the real world. |
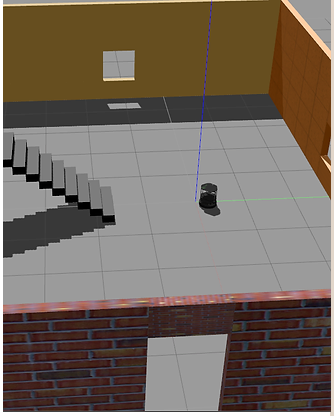 |
Aadhithya Iyer, Ritik Agrawal, Raj Ghuagare, Khush Agrawal, Himanshu Patil Shital Chiddarwar September 2021- December 2021, Github Two stage mechanism to learn an optimal staircase alignment policy. Trained a model to obtain segmented images (UNet),aimed to devise a custom made gym environ- ment and simulation environment in Gazebo. |
 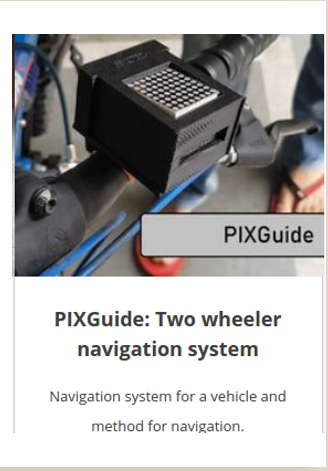 |
Aadhithya Iyer, Karan Pandya, Prakrut Kotecha, Ravishankar Gaikwad, Rohit Lal, Rishesh Agarwal, Shital Chiddarwar June 2019-August 2019 Github / Patent / Video Patent Published on 04 June 2021 A device prototype made for easy two-wheeler navigation.It has all commands of Google Maps in a single device and uses no Custom made app, but just the free voice pack feature of Google Maps which makes it easy to use. It uses an Arduino ProMini Microcontroller and the directions were displayed on the MAX7219 LED Display |
  |
Aadhithya Iyer February 2020- April 2020, Github Trained an agent to solve the OpenAI-gym CartPole-v0 and MountainCar-v0 environment using Value-Based methods like DQN and Policy Gradient approaches like REINFORCE and Actor-Critic. Results were compared graphically. |
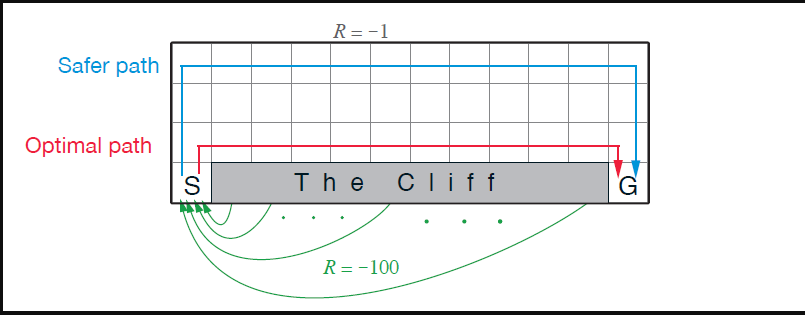 |
Aadhithya Iyer February 2020- May 2020, Github Trained an agent to find the optimal policy in a custom-made gridworld-CliffWorld using TabularRL algorithms.Trained using SARSA, Q-learning and Expected SARSA from scratch and compared their results graphically. |
  |
Aadhithya Iyer April 2020- May 2020, Github A gridworld gameplay was solved using a classical RL algorithm Qlearning |
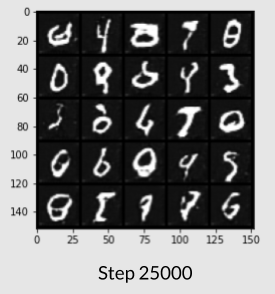 |
Aadhithya Iyer January 2021, Github Trained a WGAN to generate images of handwritten digits from scratch. Good accuracy was obtained in generating the images |
  |
Aadhithya Iyer, Tarun Kumar Yadav, Arihant Gaur, Alark Thakker February-March 2019, Video Designed a bluetooth controlled Mobile Teraformer Robot which can pick an object and place it at some other position. |
|
|
Aadhithya Iyer, Arihant Gaur, Vinit Kavalekar, Vyankatesh Muley, Ganesh Rohit, Nishit Khandelwal, BTech Thesis Project, Report Estimation of the health of a distribution transformer using Machine Learning and Estimation based techniques. |
{kind=link}
|
|
 |
Core Coordinator at IvLabs:Robotics and AI Research Lab
Project Mentor for various Open-Source Projects |

|
Secretary at IEEE Student Branch VNIT Nagpur
Teaching Volunteer for various workshops |
|
Yes you are right, I haven't built it from scratch. Source code taken from this webpage. |